开源项目
- 2025 -
温馨提示:
本项目为开源社区成果,作者及贡献者不对其安全性、合法性、适用性及最终DIY结果负责,仅作为个人纯技术学习交流参考!使用者应清楚明白声明事宜,并自行承担一切风险及后果。
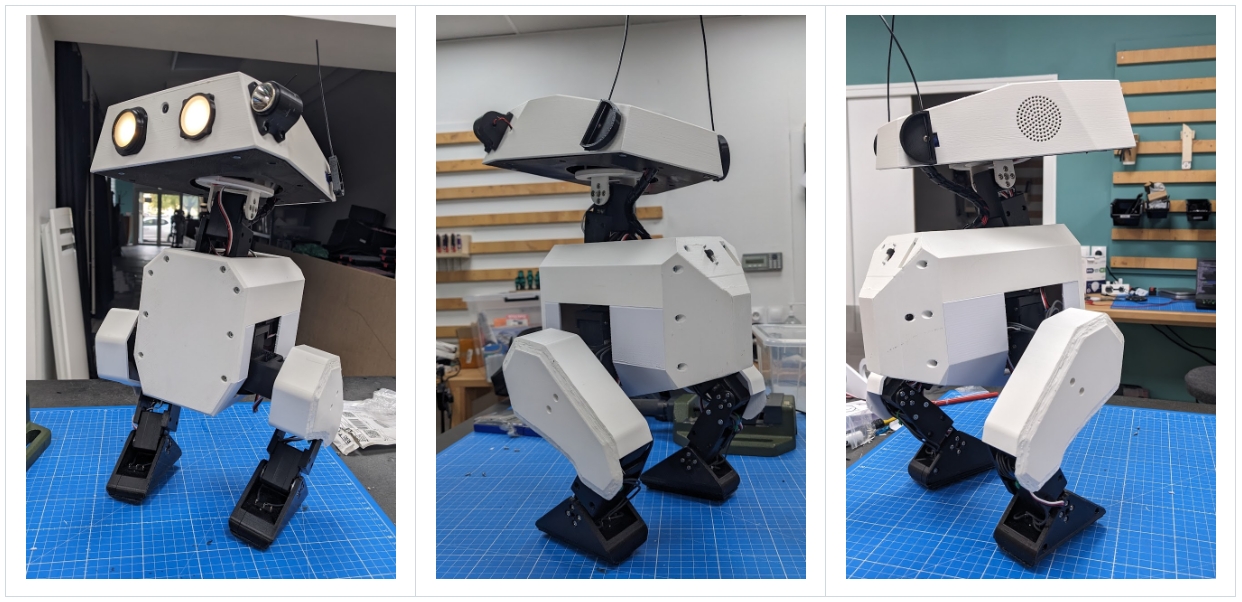
完全开源!3D打印迷你迪士尼同款双足机器人,支持行走、跳舞和跨越障碍物,萌度爆表,手搓成本仅千元,人人都可玩的科技萌宠!该项目命名为‘Open Duck Mini v2’,由法国开发者Antoine和Grégoire开发,未来还将接入自主学习系统以完成更复杂的动作。
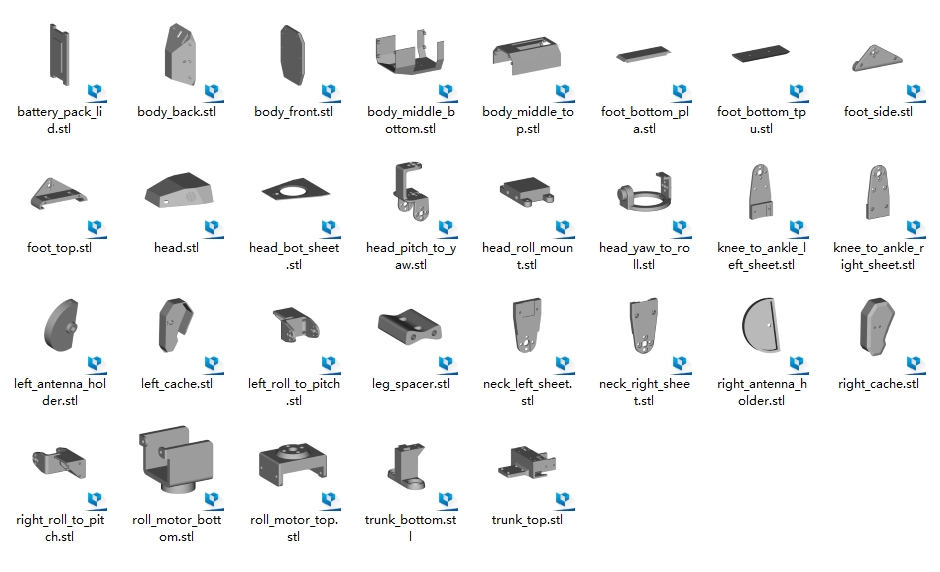
物料清单:
3D打印迷你迪士尼同款双足机器人物料清单.xlsx